Hello Guys,
i use linux 16.04 with ros kinetic and gazebo 7.0. I have a simulated turtlebot from the turtlebot package. I want to save the rgb images with timestamp like i can save the pcd files with timestamp.
At the moment i am using this to get the image:
rosrun image_view image_saver image:=/camera/rgb/image_raw
when i run this i get something like: left0000.jpg . So is it possible to get the images with timestamp ?
↧
Saving Images with image_saver with timestamp
↧
Turtlebot installation
Hi,
I am trying to install turtlebot ..on my system containing Ubuntu-16.04 LTS and ROS-Kinetic.
I am following instructions from: http://wiki.ros.org/turtlebot/Tutorials/indigo/Turtlebot%20Installation
As mentioned in the webpage the tried the following command for
Ubuntu Package Install:
> sudo apt-get install ros-indigo-turtlebot ros-indigo-turtlebot-apps ros-indigo-turtlebot-interactions ros-indigo-turtlebot-simulator ros-indigo-kobuki-ftdi ros-indigo-rocon-remocon ros-indigo-rocon-qt-library ros-indigo-ar-track-alvar-msgs
As i am using Ros-kinetic i replaced indigo in the above command line with kinetic. (Is the replacement necessary ?)
The following message is displaced on the command window:
Reading package lists... Done
Building dependency tree
Reading state information... Done
E: Unable to locate package ros-kinetic-rocon-remocon
E: Unable to locate package ros-kinetic-rocon-qt-library
E: Unable to locate package ros-kinetic-ar-track-alvar-msgss
Later, i also tried Source Installation..
When i used the command:
wstool init src -j5 https://raw.github.com/yujinrobot/yujin_tools/master/rosinstalls/kinetic/kobuki.rosinstall
The following message got diplayed:
Using initial elements from: https://raw.github.com/yujinrobot/yujin_tools/master/rosinstalls/kinetic/kobuki.rosinstall
ERROR in config: Unable to download URL [https://raw.github.com/yujinrobot/yujin_tools/master/rosinstalls/kinetic/kobuki.rosinstall]: HTTP Error 404: Not Found
I also tried the same above command with indigo:
wstool init src -j5 https://raw.github.com/yujinrobot/yujin_tools/master/rosinstalls/indigo/kobuki.rosinstall
The file got downloaded but after using catkin_make
It throughed an error:
ins/src/gazebo_ros_kobuki.cpp:8:
/usr/include/c++/5/bits/c++0x_warning.h:32:2: error: #error This file requires compiler and library support for the ISO C++ 2011 standard. This support must be enabled with the -std=c++11 or -std=gnu++11 compiler options.
#error This file requires compiler and library support \
How can i used -std=c++11 or -std=gnu++11 in catkin_make command ?
↧
↧
when I learn Customizing the Stage Simulator of stage simulation on WIKI, The world file ~/stageTutorial/tutorial.world does not exist.
I do as the tutorials on wiki, it goes wrong. it prompt me that the world file ~/stageTutorial/tutorial.world does not exist.
I change image:maze.png to image:tutorial.png
change name "maze" to "tutorial"world
change bitmap "../maze.png" to "../tutorial.png"
change include “turtlebot.inc” to include “/opt/ros/indigo/share/turtlebot_stage/maps/stage/turtlebot.inc”
But
[FATAL] [1520388380.043240020]: The world file ~/stageTutorial/tutorial.world does not exist.
err: unable to open world file ~/stageTutorial/tutorial.world : No such file or directory (/tmp/binarydeb/ros-indigo-stage-4.1.1/libstage/worldfile.cc Load)
[ERROR] [1520388380.506027547]: Map_server could not open ~/stageTutorial/tutorial.yaml.
please help me.
↧
I learn turtlebot simulation according to tutorial(Explore the Gazebo world). When I check DepthCloud, the kinect doesn't work.
I do as the toturial, and it's in Vmware. when I check LaserScan , it work.
↧
Multiple robots simulation and navigation
###How to launch multiple robots in gazebo simulator and how to setup navigation stacks for such a simulation?###
There were already some questions and answers for the subject, like: [here](answers.ros.org/question/41073/multiple-turtlebots-in-gazebo), and [here](http://answers.ros.org/question/37582/multi-robot-simulation-in-ros), and [here](http://answers.ros.org/question/40397/multirobot-laser-rviz). This is my question and answer to summarize the discussion in one place.
↧
↧
Hokuyo laser - Turtlebot costmap updation error
Hello people,
We have a turtlebot(kobuki base) and have connected Hokuyo laser to it following the instructions from these links.
- http://wiki.ros.org/turtlebot/Tutorials/hydro/Adding%20a%20Hokuyo%20laser%20to%20your%20Turtlebot
- https://github.com/hcrlab/wiki/blob/master/turtlebot/adding_hokuyo_laser.md
Previously when we tested AMCL with Kinect (as available with the turtlebot), the indoor navigation was fine and the map was updated with dynamic obstacles(like person walking in front of it, sudden obstacle not available in map) introduced then and there, and the turtlebot was able to avoid them and reach the goal.
When we tried the same with Hokuyo laser, we were able to map the area using gmapping, do AMCL as well with it and the robot was able to reach the goal. But the robot was not able to update itself with dynamic obstacles introduced. It was able to see only the static mapped obstacles and couldn't avoid dynamic obstacles while reaching its goal. Not sure if any navigation parameters are to be modified. Could anyone please help on the same???
↧
when i learn Customizing the Stage Simulator of turtlebot simlation, the following error occoured:[map_server-10] process has died [pid 16410, exit code 255, cmd /opt/ros/indigo/lib/map_server/map_server
I change image: maze.png to image:tutorial.png ,
change name "tutorial"world to name " tutorial"
,change bitmap "../tutorial.png" to bitmap"tutorial.png",
change include "turtlebot.inc" to /home/gao/turtlebot_simulator/turtlebot_stage/maps/stage/turtlebot.inc,
change roslaunch turtlebot_stage turtlebot_in_stage.launch map_file:="~/stageTutorial/tutorial.yaml" world_file:="~/stageTutorial/tutorial.world" to roslaunch turtlebot_stage turtlebot_in_stage.launch map_file:="home/username/stageTutorial/tutorial.yaml" world_file:="home/username/stageTutorial/tutorial.world".
but the following error occoured:
[map_server-10] process has died [pid 16410, exit code 255, cmd /opt/ros/indigo/lib/map_server/map_server /home/gao/stageTutorial/tutorial.yaml __name:=map_server __log:=/home/gao/.ros/log/caf69f10-28b8-11e8-b99c-000c29339bab/map_server-10.log].
↧
Moving turtlebot with own implementation of Astar
Hi,
I have managed to use turtlebot3 (gazebo and Rviz) to create a map and use its data to implement an Astar algorithm(in python).The result is the series of (x,y) coordinates to which robot should move. But now i am confused which topic to publish into to tell robot to move to those places in that sequence.I know there is move_base package but it uses its own path planners,i have read that you can create your own plugin but i feel i might be overthinking and it might be some other way.So i have two questions:
1- Which topic or topics to use to publish these locations?
2-My results are in coordinates system,do i have to convert them back into world coordinates?
Thanks.
↧
Camera for Turtlebot 2 with Skeleton Tracking (2018)
Hi All,
I am new to ROS and now exploring Turtlebot 2 and I would like to add-in the skeleton tracking features for my Turtlebot.
After doing some web searching, I found that the skeleton tracking packages available such as:
http://wiki.ros.org/openni_tracker
http://wiki.ros.org/skeleton_markers#Works_Only_With_Microsoft_Kinect
They are supporting the Xbox 360 camera or Xbox 1 camera. And they have reached EOL.
Question:
What is the camera you would recommend? In Turtlebot 2, the Orbbec Astra camera is the successor for Kinect Camera, but it also means it can't work with skeleton tracking packages such as openni_tracker, skeleton_markers ...
Any recommendation of camera that can work with Turtlebot setup, but yet can work with available Skeleton Tracking ROS software packages?
Thanks a lot for your reply / reading this question.
↧
↧
Make Turtlebot Bringup Works with Kinect v2
Hi,
I would like to make a Turtlebot simulation works with Kinect V2. I was following this tutorial (http://wiki.ros.org/rtabmap_ros/Tutorials/MappingAndNavigationOnTurtlebothttp://wiki.ros.org/rtabmap_ros/Tutorials/MappingAndNavigationOnTurtlebot).
I did the following attempt:
Kinect2 works with the driver freenect2 and can be communicated with ROS using the package iai_kinect2/kinect2_bridge.
I modified the turtlebot_bringup/launch/includes/3dsensor/kinect.launch.xml by chaning the driver include file to launch file for kinect2_bridge, and delete the arguments that are not used by kinect2_bridge. Here is the modified 3dsensor/kinect.launch.xml:
`
↧
How to make Kinect v2 Works with Turtlebot
The turtlebot supports Kinect v1 by using the freenect or openni driver, but does not support Kinect v2 which uses freenect2 driver. Does anyone know how to make Kinect v2 Works with Turtlebot? I did some search on Google, where others also have similar questions, but have no one yet come up with a solution. Thank you.
↧
Rviz: Fixed frame [Map] does not exist
Hello,
I am trying to do this tutorial [Writing A Global Path Planner As Plugin in ROS](http://wiki.ros.org/navigation/Tutorials/Writing%20A%20Global%20Path%20Planner%20As%20Plugin%20in%20ROS) and i finally managed to get to last step, to simulate on Gazebo. After using `roslaunch relaxed_astar test.launch` and `roslaunch turtlebot_rviz_launchers view_navigation.launch --screen` Gazebo opens but I get an error :
> Fixed frame [Map] does not exist
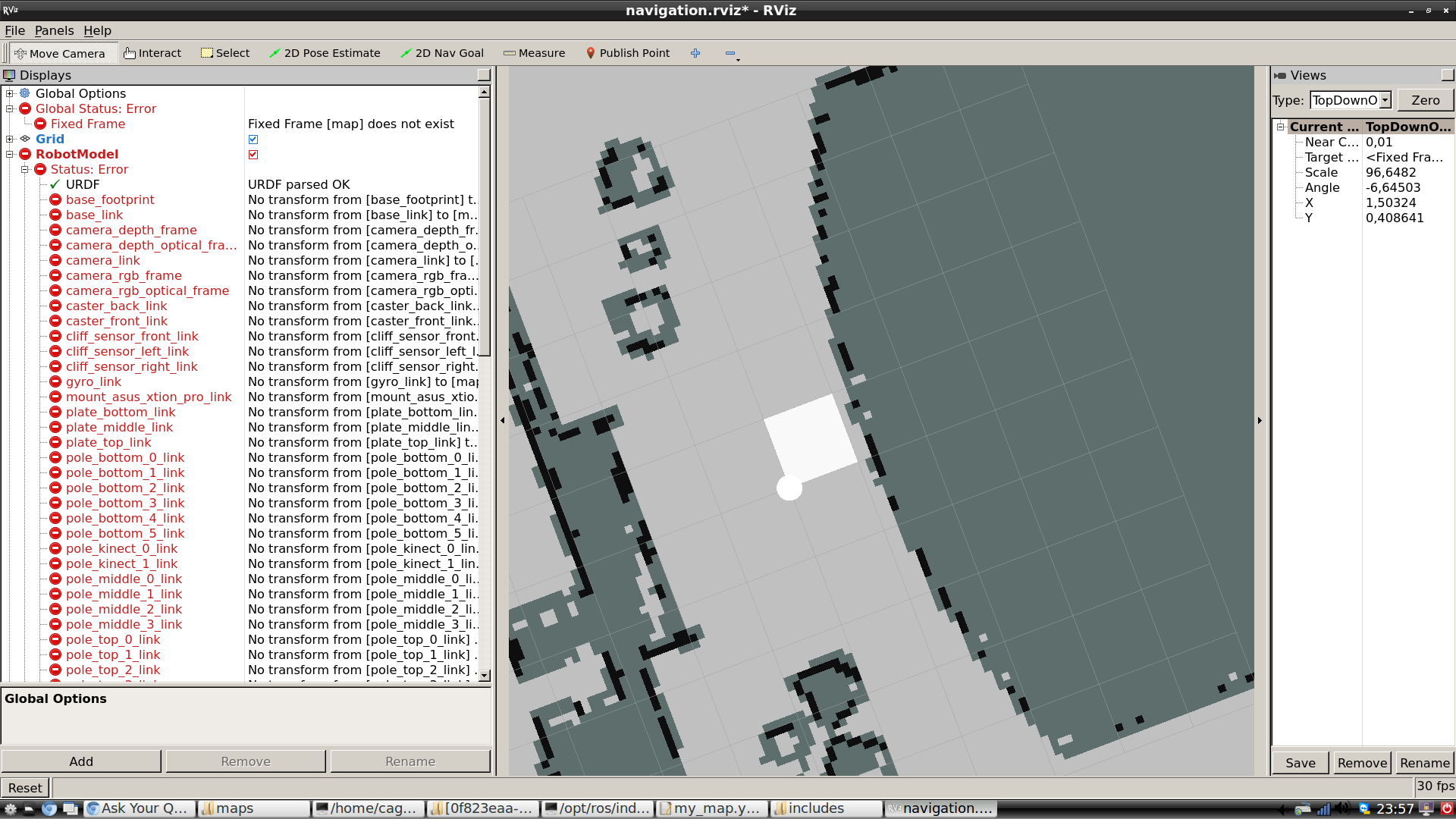
Any ideas?
Thank you.
Edit: My map files:
image: my_map.pgm
# a 584 X 526 map @ 0.100 m/cell
resolution: 0.1
origin: [-18, -15, 0.0]
occupied_thresh: 0.65
free_thresh: 0.196
negate: 0
My launch file :
↧
Why won't the /scan topic display rounded values?
Hello,
I am a student at a university of applied sciences, working on a robot that uses the Hokuyo UBG-04LX-F01 LIDAR.
The robot that I use runs on Ubuntu 12.0.4.5 with ROS Hydro Medusa.
The LIDAR of this robot supposedly has a minimum detection range of 20 millimetres and a maximum detection range of 5600 millimetres. This LIDAR is already installed on the robot and it is publishing data to the /scan topic with sensor_msgs/LaserScan messages.
However, when I echo the content of the /scan topic with the rostopic echo /scan command, it shows the following data:
seq: 75922
stamp:
secs: 1522051099
nsecs: 302610304
frame_id: laser
angle_min: -1.50330114365
angle_max: 1.49716520309
angle_increment: 0.00613592332229
time_increment: 2.44140628638e-05
scan_time: 0.0250000003725
range_min: 0.019999999553
range_max: 5.59999990463
ranges: []
intensities: []
This output shows that the LIDAR has a minimum range of 0.019999999553 metres. Why such a strange value? Is this due to rounding errors between integers and floats?
The same thing goes for other fields like the angle_min and angle_max, which are configured with an angle of -1.5 and 1.5 radians respectively.
I notice a comparable thing with the turtlebot, running in a gazebo simulation on ubuntu 16.0.4.4 with ROS Kinetic Kame, which shows a minimum range of 0.449999988079 (range_min: 0.449999988079).
Could somebody explain what is going on here? Why can't the output of the /scan topic have rounded values?
↧
↧
Using Google Cartographer with Turtlebot in a custom world?
I am a beginner in robotics and I am trying to use Google Cartographer to make my simulated **Turtlebot build a map autonomously of its environment.**
I have done already all the tutorials in ROS and I can make the robot build the map using teleoperation, but I don't know how to make it build the map by itself. I want to use Google Cartographer for this.
I can however run the demo provided by Google and it works (it builds the map of a Museum).
# Launch the 2D depth camera demo.
roslaunch cartographer_turtlebot demo_depth_camera_2d.launch bag_filename:=${HOME}/Downloads/cartographer_turtlebot_demo.bag
**The questions:**
---------------
How can I run it on my own world instead of the bag file of that museum?
Does it need a yaml map like the one I built with teleoperation? what is the command to make it use my yaml map instead of a bag file?
Can I use a .png image with yaml context?
[![enter image description here][1]][1]
Could it use the gazebo simulated worlds that are .sdf? What is the command to input this then?
These are the specifications I have:
- Ubuntu Xenial
- ROS Kinetic
- Gazebo 7
- Turtlebot2
- Google Cartographer for turtlebot
Thanks a lot! It's like I understand the concepts but I don't know how to link things together to make them work.
[1]: https://i.stack.imgur.com/B8Akj.png
↧
TurtleBot Bringup Not Connecting to Port
I've been using the TurtleBot3 Waffle with Intel Joule processor for about a month now, and everything has been working very smoothly up until yesterday. Yesterday I followed the same process I usually use to set the TurtleBot up to communicate with a Remote PC:
[Remote PC]
1. Run `roscore`
2. Run `roslaunch turtlebot3_bringup turtlebot3_remote.launch`
[TurtleBot]
1. Power up the robot
2. Run `roslaunch turtlebot3_bringup turtlebot3_robot.launch`
After I run these steps, I usually am able to publish/subscribe to the various ROS topics the robot publishes/subscribes to. Yesterday I ran this setup and received this console output after launching the turtlebot3_robot.launch on the TurtleBot:
Checking log directory for disk usage. This may take awhile.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
started roslaunch server http://[hostname]:45747/
SUMMARY
========
PARAMETERS
* /rosdistro: kinetic
* /rosversion: 1.12.13
* /turtlebot3_core/baud: 115200
* /turtlebot3_core/port: /dev/ttyACM0
* /turtlebot3_lds/frame_id: base_scan
* /turtlebot3_lds/port: /dev/ttyUSB0
NODES
/
turtlebot3_core (rosserial_python/serial_node.py)
turtlebot3_diagnostics (turtlebot3_bringup/turtlebot3_diagnostics)
turtlebot3_lds (hls_lfcd_lds_driver/hlds_laser_publisher)
ROS_MASTER_URI=http://[master_uri]:11311
process[turtlebot3_core-1]: started with pid [2603]
process[turtlebot3_lds-2]: started with pid [2604]
process[turtlebot3_diagnostics-3]: started with pid [2605]
[INFO] [1522418950.044044, 0.000000]: ROS Serial Python Node
[INFO] [1522418950.263477, 0.000000]: Connecting to /dev/ttyACM0 at 115200 baud
And that's as far as it gets. It's getting hung up on connecting the OpenCR port. The only similar scenario to mine that I've seen asked about on here is at the following link: [https://github.com/ROBOTIS-GIT/turtlebot3/issues/69](https://github.com/ROBOTIS-GIT/turtlebot3/issues/69). I've followed all the instructions in the answers provided with no successful outcome. Strangely enough, I let the robot charge overnight, and when I powered it on again this morning, it worked fine for the first 3 or 4 times I ran the boot sequence above. Then I tried to start again after 3-4 successes, and I ran into the same issue. It gets stuck on the connecting step. I am able to connect to the OpenCR board and flash the turtlebot3_core firmware from the Arduino program, so I know I have connectivity to the board. It's just the turtlebot3_robot.launch sequence that seems to be having trouble with connecting. I'm planning to re-flash the BIOS for the Intel Joule processor being used alongside the OpenCR board. I have tried powering on and off, unplugging and plugging back in every port possible to try and diagnose the issue, but I haven't had any success. If more information is needed, I would be happy to provide it. Thanks for the help.
And that's as far as it gets. It's getting hung up on connecting the OpenCR port. The only similar scenario to mine that I've seen asked about on here is at the following link: [https://github.com/ROBOTIS-GIT/turtlebot3/issues/69](https://github.com/ROBOTIS-GIT/turtlebot3/issues/69). I've followed all the instructions in the answers provided with no successful outcome. Strangely enough, I let the robot charge overnight, and when I powered it on again this morning, it worked fine for the first 3 or 4 times I ran the boot sequence above. Then I tried to start again after 3-4 successes, and I ran into the same issue. It gets stuck on the connecting step. I am able to connect to the OpenCR board and flash the turtlebot3_core firmware from the Arduino program, so I know I have connectivity to the board. It's just the turtlebot3_robot.launch sequence that seems to be having trouble with connecting. I'm planning to re-flash the BIOS for the Intel Joule processor being used alongside the OpenCR board. I have tried powering on and off, unplugging and plugging back in every port possible to try and diagnose the issue, but I haven't had any success. If more information is needed, I would be happy to provide it. Thanks for the help.
↧
cannot launch kobuki_dashboard on kinetic
Hi, I'm trying to setup a turtlebot on ubuntu 16, ROS kinetic.
Installation went well so far. My laptop and the turtlebot netbook can ping each other. I can roslaunch on the turtlebot fine.
I am following the tutorial at: http://wiki.ros.org/turtlebot_bringup/Tutorials/indigo/PC%20Bringup
When I try the command `rqt -s kobuki_dashboard`, I get the following error:
RosPluginProvider.load(kobuki_dashboard/KobukiDashboard) exception raised in __builtin__.__import__(kobuki_dashboard.dashboard, [KobukiDashboard]):
Traceback (most recent call last):
File "/opt/ros/kinetic/lib/python2.7/dist-packages/rqt_gui/ros_plugin_provider.py", line 77, in load
module = __builtin__.__import__(attributes['module_name'], fromlist=[attributes['class_from_class_type']], level=0)
File "/opt/ros/kinetic/lib/python2.7/dist-packages/kobuki_dashboard/dashboard.py", line 8, in
from QtGui import QMessageBox, QAction
ImportError: cannot import name QMessageBox
PluginManager._load_plugin() could not load plugin "kobuki_dashboard/KobukiDashboard":
Traceback (most recent call last):
File "/opt/ros/kinetic/lib/python2.7/dist-packages/qt_gui/plugin_handler.py", line 99, in load
self._load()
File "/opt/ros/kinetic/lib/python2.7/dist-packages/qt_gui/plugin_handler_direct.py", line 54, in _load
self._plugin = self._plugin_provider.load(self._instance_id.plugin_id, self._context)
File "/opt/ros/kinetic/lib/python2.7/dist-packages/qt_gui/composite_plugin_provider.py", line 71, in load
instance = plugin_provider.load(plugin_id, plugin_context)
File "/opt/ros/kinetic/lib/python2.7/dist-packages/qt_gui/composite_plugin_provider.py", line 71, in load
instance = plugin_provider.load(plugin_id, plugin_context)
File "/opt/ros/kinetic/lib/python2.7/dist-packages/rqt_gui_py/ros_py_plugin_provider.py", line 60, in load
return super(RosPyPluginProvider, self).load(plugin_id, plugin_context)
File "/opt/ros/kinetic/lib/python2.7/dist-packages/qt_gui/composite_plugin_provider.py", line 71, in load
instance = plugin_provider.load(plugin_id, plugin_context)
File "/opt/ros/kinetic/lib/python2.7/dist-packages/rqt_gui/ros_plugin_provider.py", line 83, in load
raise e
ImportError: cannot import name QMessageBox
Same when I try to launch the dashboard via `rosrun kobuki_dashboard kobuki_dashboard`.
It seems to be related to QT. Any ideas how to fix?
Cheers
Isaac
---
Edit: If I "fix" the file in question, "dashboard.py", by changing line 8 to:
from PyQt4.QtGui import QMessageBox, QAction
Then python will segfault. Here's a backtrace from gdb:
#0 0x00007fff9645e5a4 in ?? () from /usr/lib/x86_64-linux-gnu/libQtGui.so.4
#1 0x00007ffff7de74ea in call_init (l=, argc=argc@entry=4,
argv=argv@entry=0x7fffffffd858, env=env@entry=0xeb2920) at dl-init.c:72
#2 0x00007ffff7de75fb in call_init (env=0xeb2920, argv=0x7fffffffd858,
argc=4, l=) at dl-init.c:30
#3 _dl_init (main_map=main_map@entry=0x2deef60, argc=4, argv=0x7fffffffd858,
env=0xeb2920) at dl-init.c:120
#4 0x00007ffff7dec712 in dl_open_worker (a=a@entry=0x7fffffffb310)
at dl-open.c:575
#5 0x00007ffff7de7394 in _dl_catch_error (
objname=objname@entry=0x7fffffffb300,
errstring=errstring@entry=0x7fffffffb308,
mallocedp=mallocedp@entry=0x7fffffffb2ff,
operate=operate@entry=0x7ffff7dec300 ,
args=args@entry=0x7fffffffb310) at dl-error.c:187
#6 0x00007ffff7debbd9 in _dl_open (
file=0x2b49180 "/usr/lib/python2.7/dist-packages/PyQt4/QtGui.so",
mode=-2147483646, caller_dlopen=0x5231c3 <_PyImport_GetDynLoadFunc+243>,
nsid=-2, argc=, argv=, env=0xeb2920)
at dl-open.c:660
#7 0x00007ffff75edf09 in dlopen_doit (a=a@entry=0x7fffffffb540) at dlopen.c:66
#8 0x00007ffff7de7394 in _dl_catch_error (objname=0xa6c770,
errstring=0xa6c778, mallocedp=0xa6c768,
operate=0x7ffff75edeb0 , args=0x7fffffffb540)
at dl-error.c:187
#9 0x00007ffff75ee571 in _dlerror_run (
operate=operate@entry=0x7ffff75edeb0 ,
args=args@entry=0x7fffffffb540) at dlerror.c:163
#10 0x00007ffff75edfa1 in __dlopen (file=, mode=)
at dlopen.c:87
#11 0x00000000005231c3 in _PyImport_GetDynLoadFunc ()
#12 0x0000000000522d6f in _PyImport_LoadDynamicModule ()
#13 0x00000000004afbad in ?? ()
#14 0x00000000004af34d in PyImport_ImportModuleLevel ()
#15 0x00000000004b0f78 in ?? ()
#16 0x00000000004b0cb3 in PyObject_Call ()
#17 0x00000000004ce5d0 in PyEval_CallObjectWithKeywords ()
#18 0x00000000004c6ed6 in PyEval_EvalFrameEx ()
#19 0x00000000004c2765 in PyEval_EvalCodeEx ()
#20 0x00000000004c2509 in PyEval_EvalCode ()
#21 0x00000000004c061b in PyImport_ExecCodeModuleEx ()
#22 0x00000000004bd6ee in ?? ()
#23 0x00000000004afbad in ?? ()
#24 0x00000000004af34d in PyImport_ImportModuleLevel ()
#25 0x00000000004b0f78 in ?? ()
#26 0x00000000004cada2 in PyEval_EvalFrameEx ()
#27 0x00000000004c9d8f in PyEval_EvalFrameEx ()
#28 0x00000000004c9d8f in PyEval_EvalFrameEx ()
---Type to continue, or q to quit---
#29 0x00000000004c9d8f in PyEval_EvalFrameEx ()
#30 0x00000000004c9d8f in PyEval_EvalFrameEx ()
#31 0x00000000004c9d8f in PyEval_EvalFrameEx ()
#32 0x00000000004c9d8f in PyEval_EvalFrameEx ()
#33 0x00000000004c2765 in PyEval_EvalCodeEx ()
#34 0x00000000004ca099 in PyEval_EvalFrameEx ()
#35 0x00000000004c2765 in PyEval_EvalCodeEx ()
#36 0x00000000004ca099 in PyEval_EvalFrameEx ()
#37 0x00000000004c2765 in PyEval_EvalCodeEx ()
#38 0x00000000004ca099 in PyEval_EvalFrameEx ()
#39 0x00000000004c2765 in PyEval_EvalCodeEx ()
#40 0x00000000004ca099 in PyEval_EvalFrameEx ()
#41 0x00000000004c2765 in PyEval_EvalCodeEx ()
#42 0x00000000004ca099 in PyEval_EvalFrameEx ()
#43 0x00000000004c2765 in PyEval_EvalCodeEx ()
#44 0x00000000004ca099 in PyEval_EvalFrameEx ()
#45 0x00000000004c2765 in PyEval_EvalCodeEx ()
#46 0x00000000004c2509 in PyEval_EvalCode ()
#47 0x00000000004f1def in ?? ()
#48 0x00000000004ec652 in PyRun_FileExFlags ()
#49 0x00000000004eae31 in PyRun_SimpleFileExFlags ()
#50 0x000000000049e14a in Py_Main ()
#51 0x00007ffff7811830 in __libc_start_main (main=0x49dab0 , argc=4,
argv=0x7fffffffd858, init=, fini=,
rtld_fini=, stack_end=0x7fffffffd848)
at ../csu/libc-start.c:291
#52 0x000000000049d9d9 in _start ()
Any ideas? I concluded that it must be PyQt4.QtGui, and not PyQt5.QtGui, because the latter doesn't contain QMessageBox.
↧
Multi-turtlebot3-simulation
HI , all
I am newbie . I want to add a swarm of turtlebot3(burger or waffle) in gazebo to simulate advanced control .
I used the method as the follwing website :
[http://turtlebot3.readthedocs.io/en/latest/simulation.html]
Because turtlebot3_empty_world.launch file only spawn a turtlebot in gazebo , i tried to modify the launch file :
↧
↧
How could TurtleBot3 communicate with TurtleBot2?
I want buy TurtleBot3 to perform Multi-robot SLAM together with TurtleBot2,so I urgently know how they can communicate.
Thanks.
↧
Faster publishing Rate for Pointcloud to PCD(pcl_ros)
Hello Guys,
i use ros kinetic with gazebo 7.0. I have a world with a turtlebot inside and i want to get pcd files from the /camera/depth/point topic. Now i found a method to get pcd files from the published pointcloud with:
rosrun pcl_ros pointcloud_to_pcd input:=/camera/depth/points
But i got only 1 file every second is there a way to speed it up ?
↧
Issue installing turtlebot3 simulation on ubuntu 16.04
I switched from ubuntu 14.04 to ubuntu 16.04 and try to completely remove ros indigo and install ros kinetic and gazebo9
I followed a guide to install .
This is a lists of my command on terminal:
cd ~/catkin_ws/src
1) git clone https://github.com/ROBOTIS-GIT/turtlebot3_simulations.git
2) git clone https://github.com/ROBOTIS-GIT/turtlebot3_msgs.git
3) git clone https://github.com/ROBOTIS-GIT/turtlebot3.git
4) cd ~/catkin_ws && catkin_make && source ~/catkin_ws/devel/setup.bash
cd ..
catkin_make
This is the last part of output
Scanning dependencies of target turtlebot3_fake_node
[ 70%] Built target turtlebot3_example_generate_messages_cpp
[ 80%] Built target turtlebot3_example_generate_messages_eus
[ 89%] Built target turtlebot3_example_generate_messages_lisp
make[2]: *** No rule to make target '/usr/lib/liblog4cxx.so', needed by '/home/me/catkin_ws/devel/lib/turtlebot3_gazebo/turtlebot3_drive'. Stop.
CMakeFiles/Makefile2:4337: recipe for target 'turtlebot3_simulations/turtlebot3_gazebo/CMakeFiles/turtlebot3_drive.dir/all' failed
make[1]: *** [turtlebot3_simulations/turtlebot3_gazebo/CMakeFiles/turtlebot3_drive.dir/all] Error 2
make[1]: *** Waiting for unfinished jobs....
make[2]: *** No rule to make target '/usr/lib/liblog4cxx.so', needed by '/home/me/catkin_ws/devel/lib/turtlebot3_bringup/turtlebot3_diagnostics'. Stop.
CMakeFiles/Makefile2:1680: recipe for target 'turtlebot3/turtlebot3_bringup/CMakeFiles/turtlebot3_diagnostics.dir/all' failed
make[1]: *** [turtlebot3/turtlebot3_bringup/CMakeFiles/turtlebot3_diagnostics.dir/all] Error 2
[ 89%] Built target turtlebot3_msgs_generate_messages
make[2]: *** No rule to make target '/usr/lib/liblog4cxx.so', needed by '/home/me/catkin_ws/devel/lib/turtlebot3_fake/turtlebot3_fake_node'. Stop.
make[2]: *** Waiting for unfinished jobs....
[ 91%] Building CXX object turtlebot3_simulations/turtlebot3_fake/CMakeFiles/turtlebot3_fake_node.dir/src/turtlebot3_fake.cpp.o
CMakeFiles/Makefile2:3683: recipe for target 'turtlebot3_simulations/turtlebot3_fake/CMakeFiles/turtlebot3_fake_node.dir/all' failed
make[1]: *** [turtlebot3_simulations/turtlebot3_fake/CMakeFiles/turtlebot3_fake_node.dir/all] Error 2
Makefile:138: recipe for target 'all' failed
make: *** [all] Error 2
Invoking "make -j4 -l4" failed
Suggestions? I'm a newbie on ROS
↧